Wykład 2:
Sygnały zegarowe
Mariusz Chilmon
m.chilmon@amw.gdynia.pl
uc.vmario.org
Układy asynchroniczne i synchroniczne
Układy asynchroniczne

Układy asynchroniczne
- szybkie
- energooszczędne
- trudne w projektowaniu
Układy synchroniczne
Układy synchroniczne
- wolniejsze
- zużywają energię cały czas
- łatwiejsze do zaprojektowania
Pierwszy asynchroniczny mikroprocesor
- California Institute of Technology, Pasadena, 1988–1989
- samoistnie dostosowuje szybkość do temperatury
- samoistnie dostosowuje szybkość do napięcia zasilania
- 4× mniej energii niż synchroniczny odpowiednik przy tej samej wydajności
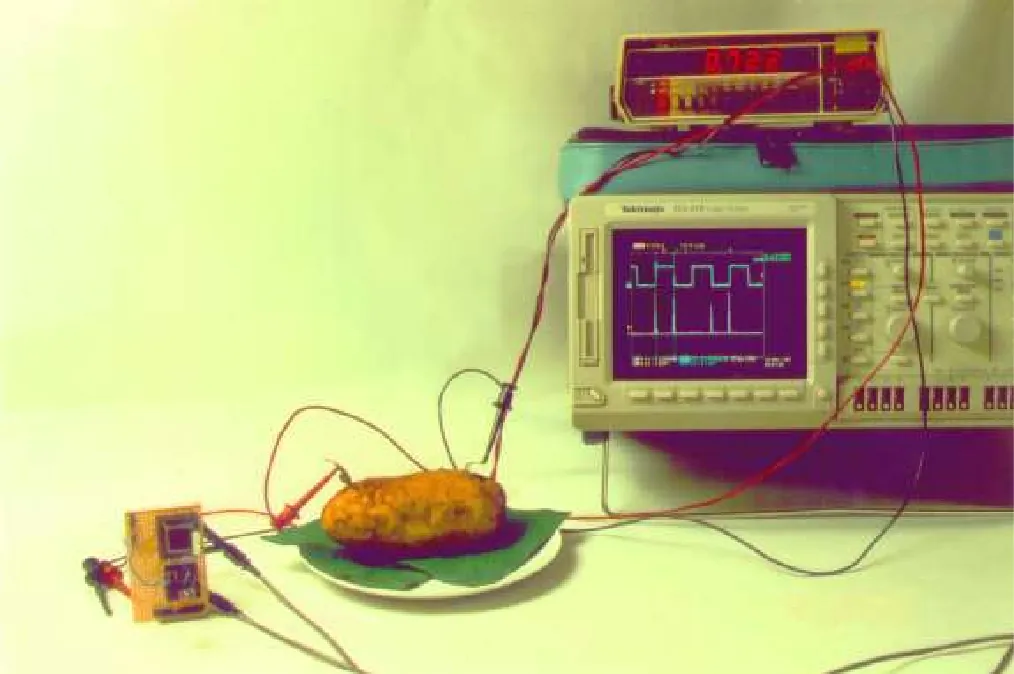
Zasilanie bulwą
Intel RAPPID
- Revolving Asynchronous Pentium® Processor Instruction Decoder
- 1995–1999
- 3× szybszy
- 2× mniejsze zużycie energii
- 5× dłuższy czas projektowania 💵💰🤑
- trudne testowanie
- pewne koncepcje wykorzystane w Pentium 4
Programowanie asynchroniczne ⁕
- nie ma związku z układami asynchronicznymi
- pozwala obsługiwać wiele zdarzeń o stosunkowo długim czasie wykonania bez blokowania programu
Źródła zegarowe
Oscylator RC
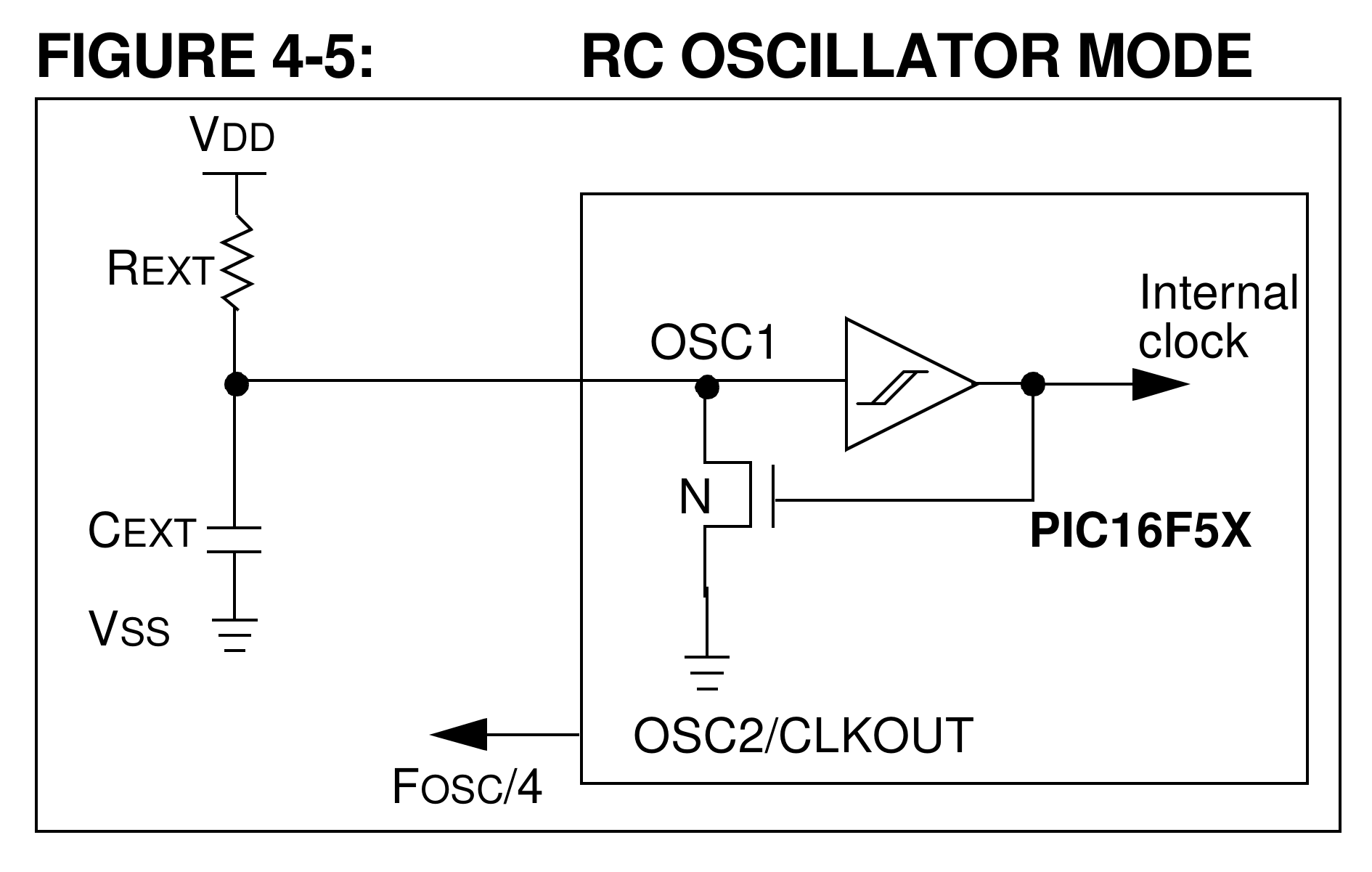
Oscylator RC
- tani
- mały (możliwy do wbudowania w układ scalony)
- energooszczędny
- niedokładny
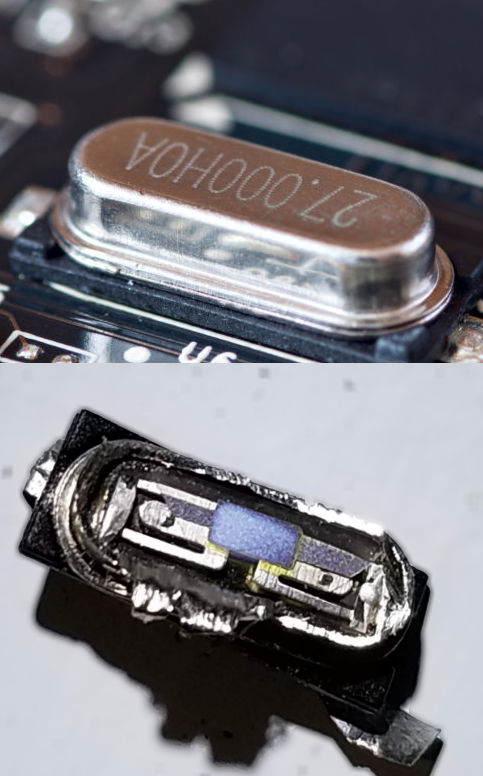
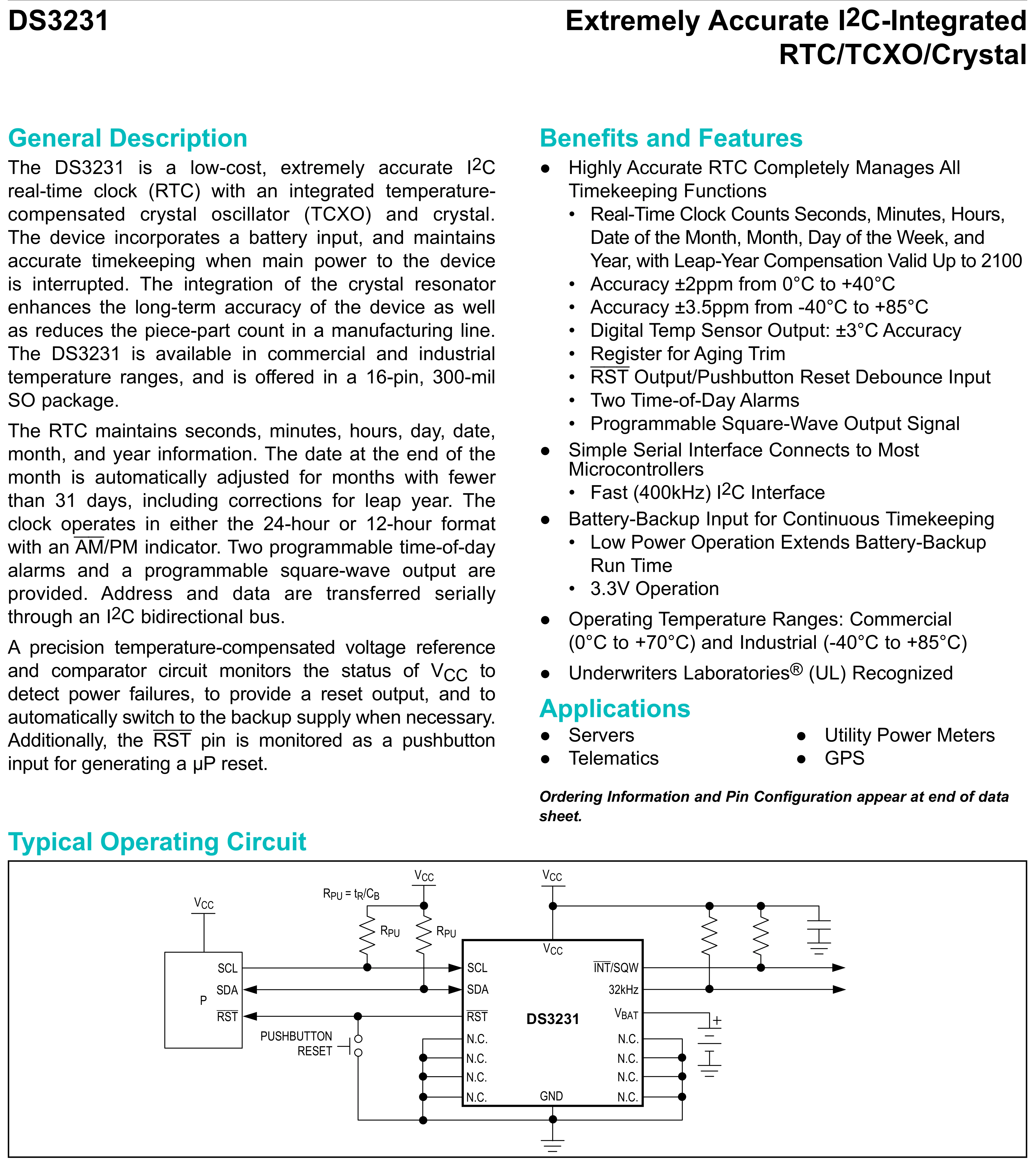
Rezonator kwarcowy (XO/XTAL)
- droższy
- większy
- zużywa więcej energii
- bardzo dokładny (zwłaszcza VCXO, TCXO i OCXO)
Rezonatory kwarcowe
- VCXO
- Voltage-Controlled Crystal Oscillator
- TCXO
- Temperature-Compensated Crystal Oscillator
- OCXO
- Oven-Controlled Crystal Oscillator
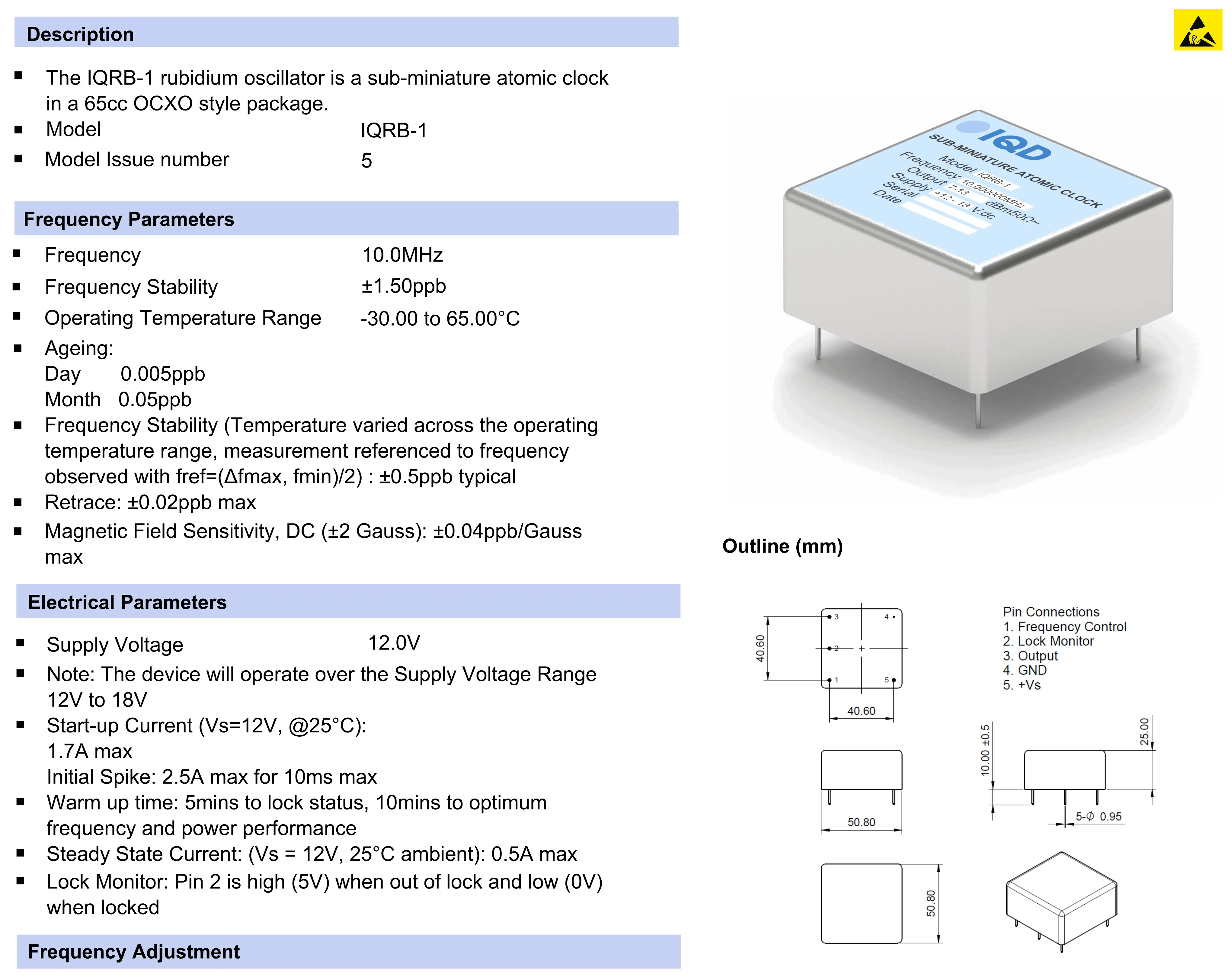
Wzorzec rubidowy
- nieludzko dokładny
- bardzo drogi
- zużywa dużo energii
Odbiornik GNSS (np. GPS) — 1PPS
- bardzo dokładny
- stosunkowo tani
- ma średnie zapotrzebowanie na energię
- dostarcza również czas rzeczywisty
- wymaga sygnału z satelity

Przykładowe dokładności wzorców czasu
| Źródło | Dokładność | Odchyłka |
|---|---|---|
| RC | ±1% | 7h/miesiąc |
| XO | ±20ppm | 51s/miesiąc |
| OCXO | ±100ppb | 3s/rok |
| Rb | ±1,5ppb | 47ms/rok |
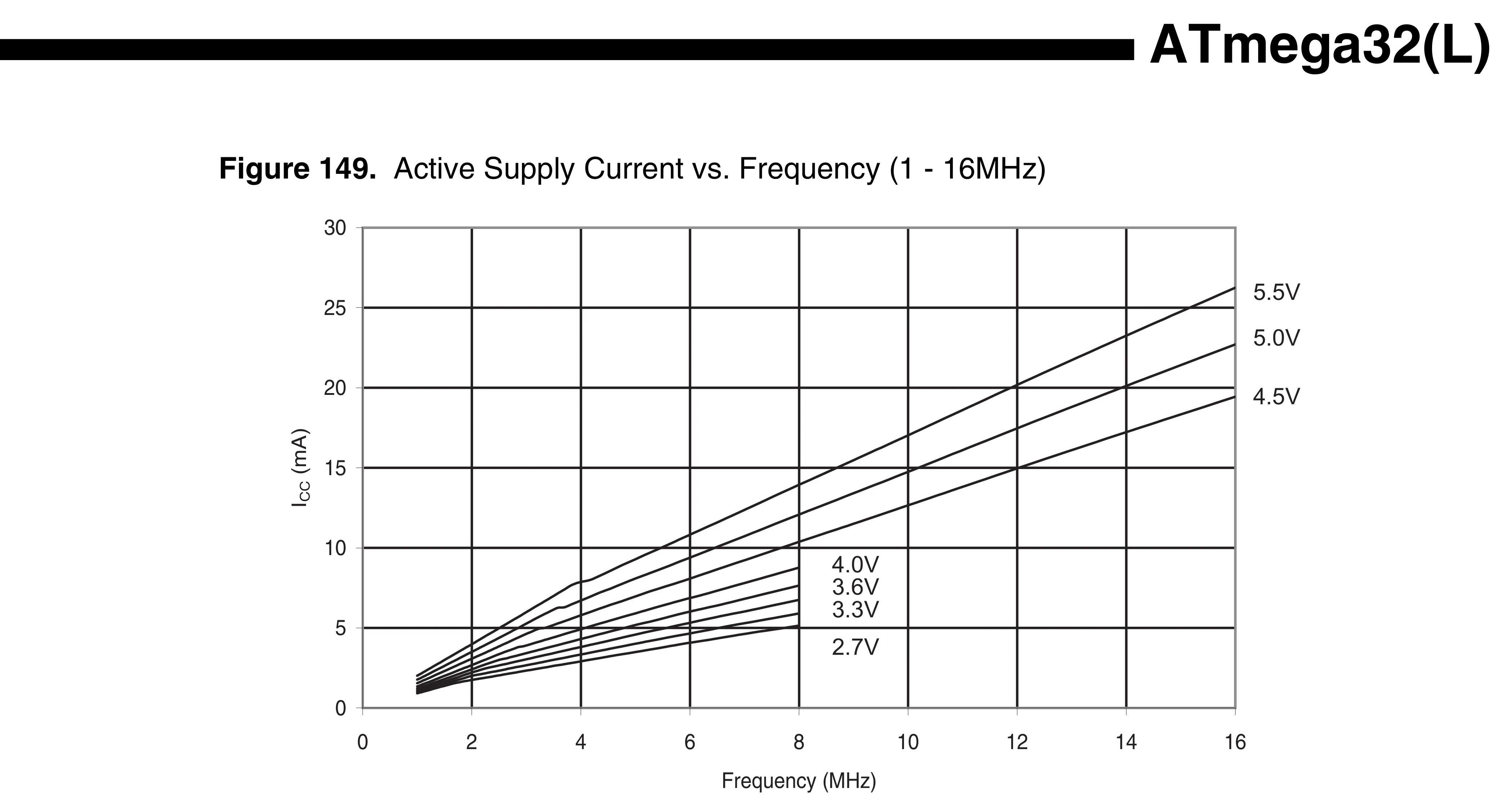
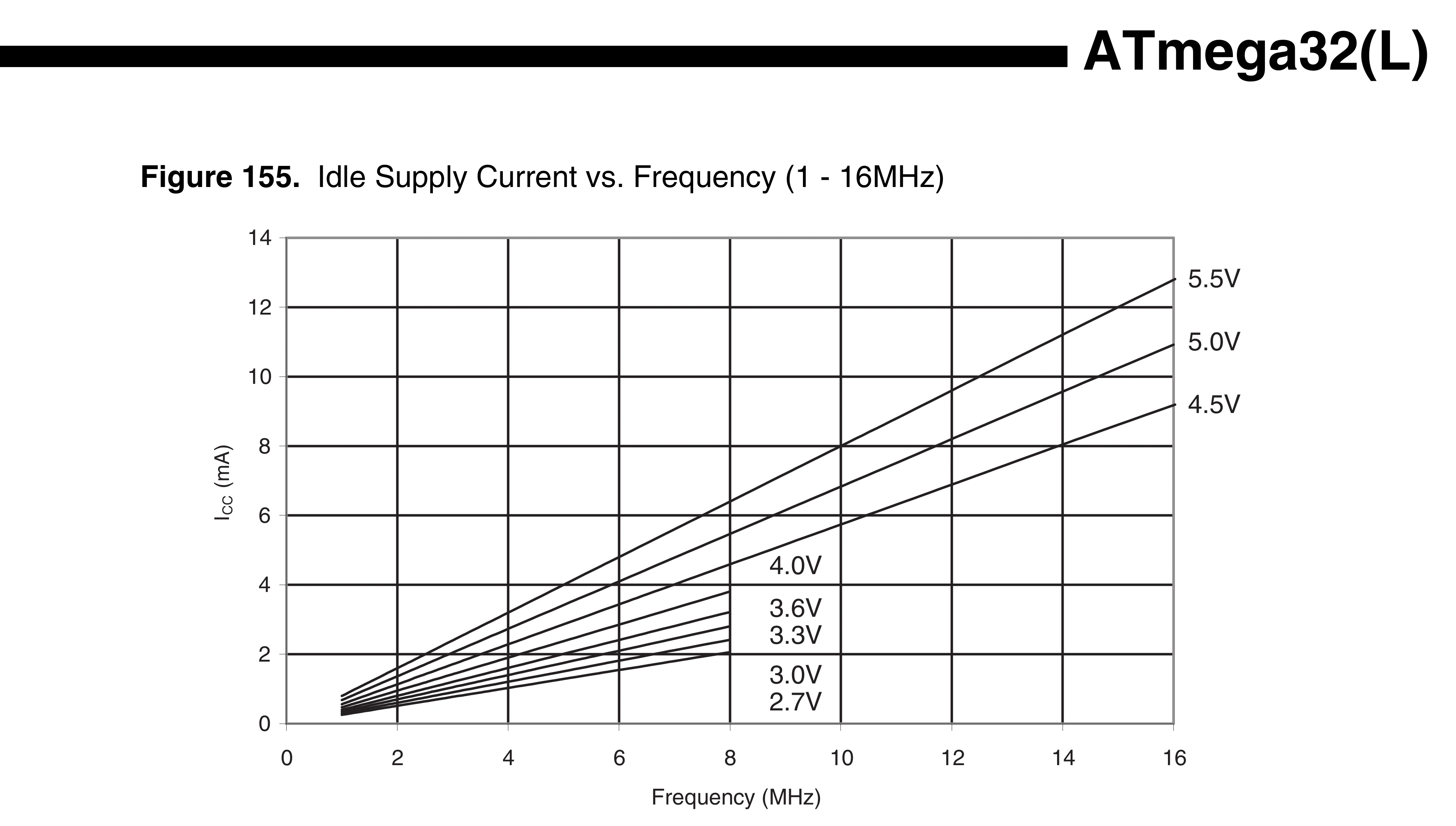
Regulacja szybkości zegara
Szybki zegar \(\Rightarrow\) problem
- duże zużycie energii
- wydzielanie ciepła
- wyższe napięcie zasilania
- generowanie zakłóceń
- zjawiska falowe
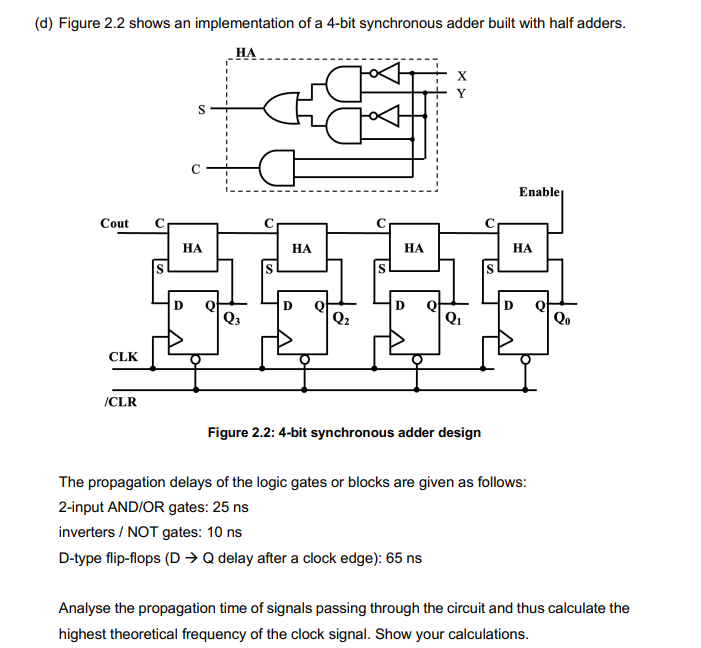
- czas propagacji
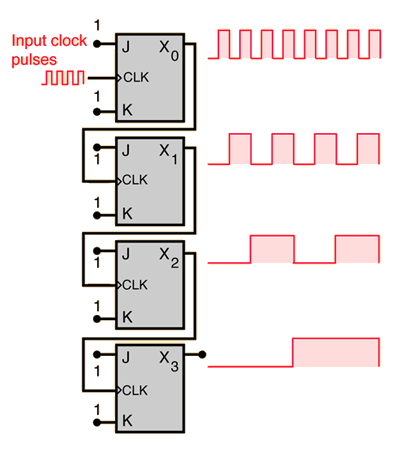
Dzielnik częstotliwości — divider
- najprościej podzielić częstotliwość przez $2^n$
- możliwe jest uzyskanie podziału także przez $n$
- nie ma możliwości zwiększenia częstotliwości
- wymaga zewnętrznego źródła zegara

VCO

VCO — Voltage-Controlled Oscillator
- sterowany napięciem generator RC
- jest źródłem zegara, ale o niskiej dokładności
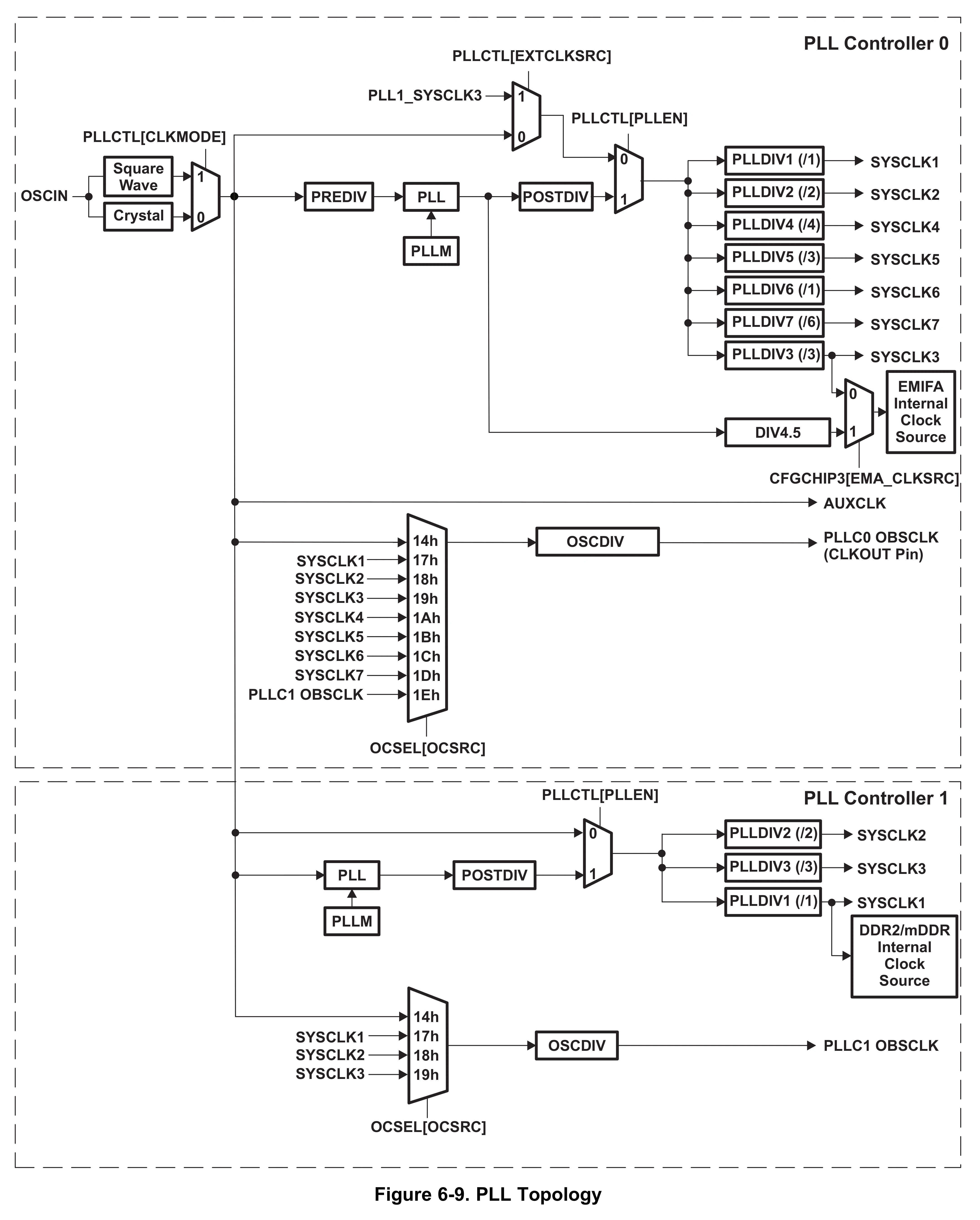
PLL — Phase-Locked Loop
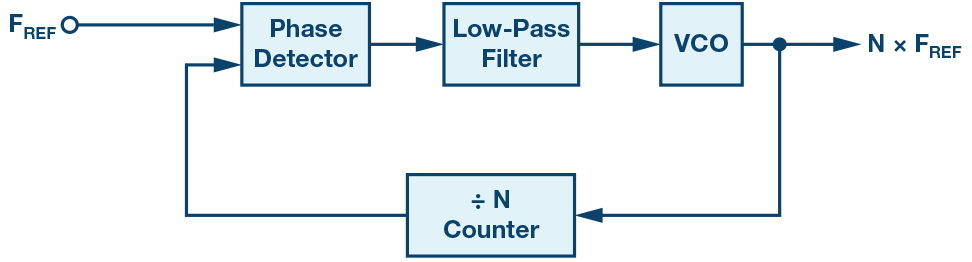
Zalety PLL
- mnoży częstotliwość wzorcową przez $n$
- w połączeniu z dzielnikiem przez $m$ pozwala uzyskać współczynnik $\frac{n}{m}$
- bardzo elastyczne rozwiązanie — must-have dla nowoczesnego mikrokontrolera
Wady PLL
- skomplikowany obwód analogowo-cyfrowy
- często stabilność uzyskuje tylko w pewnym zakresie częstotliwości wejściowej
- uzyskanie stabilności zajmuje pewien czas i może być sygnalizowane w odpowiednim rejestrze
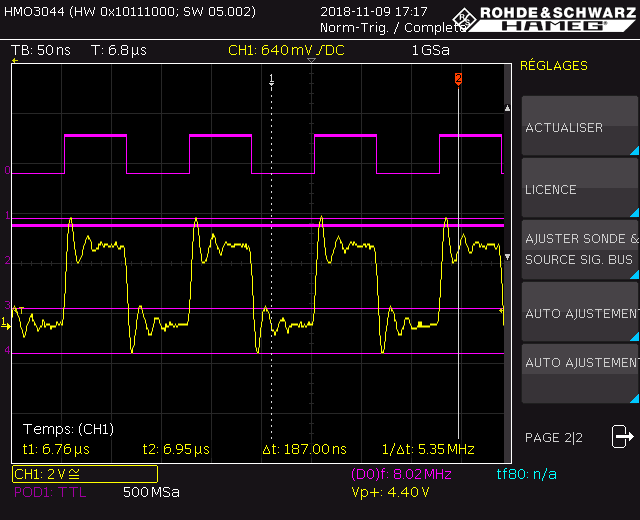
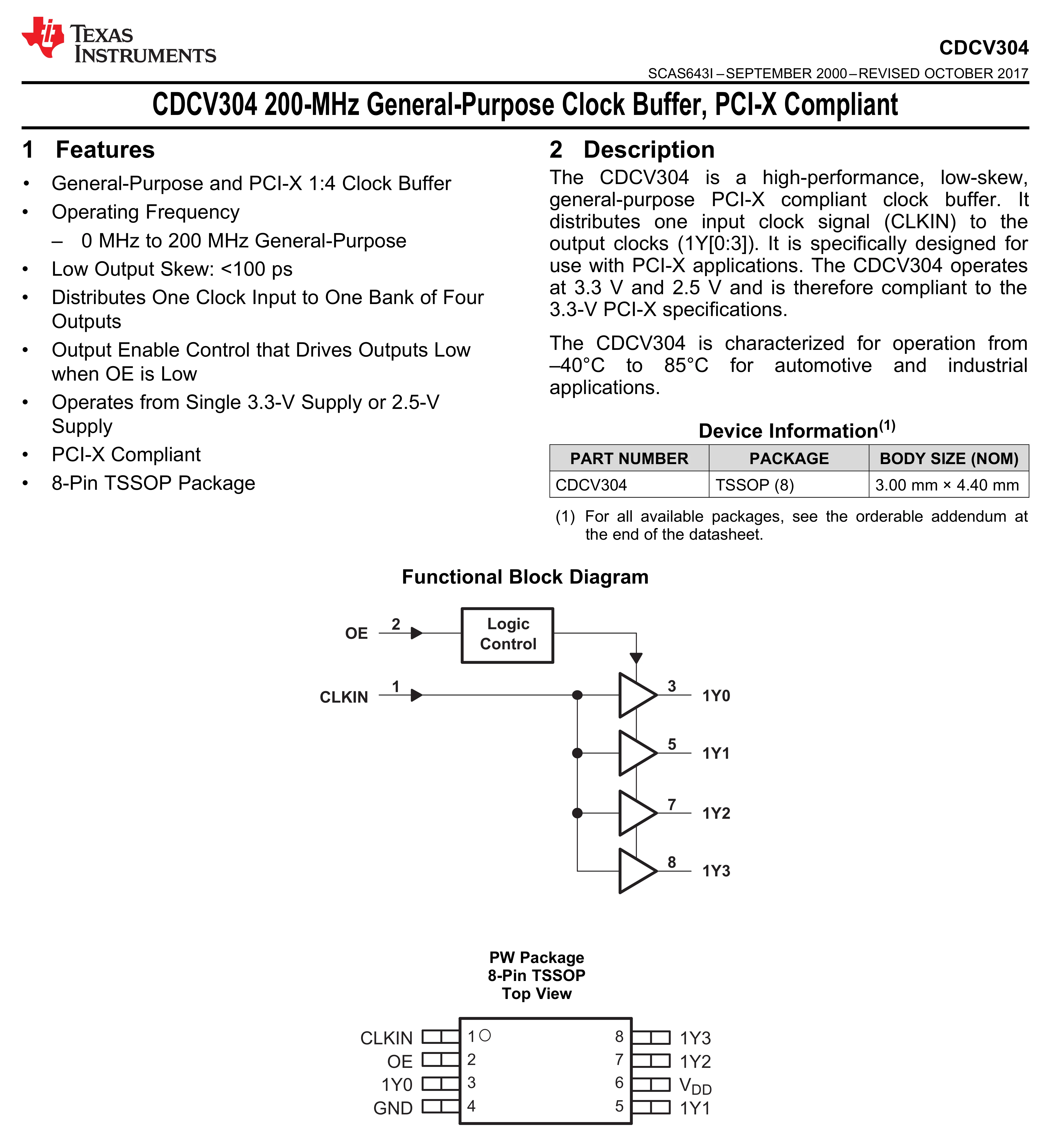
Kondycjonowanie i propagacja sygnału zegarowego
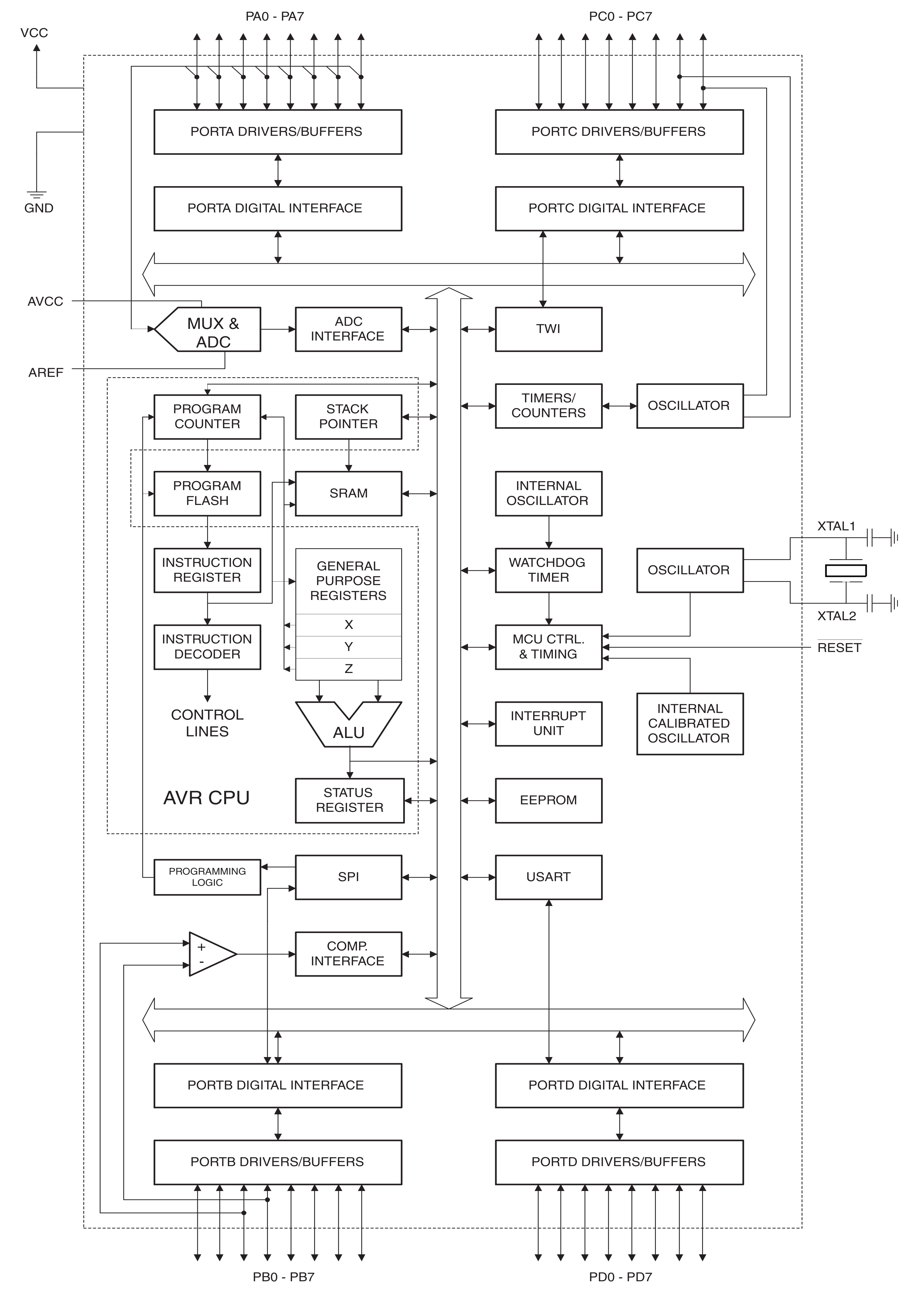
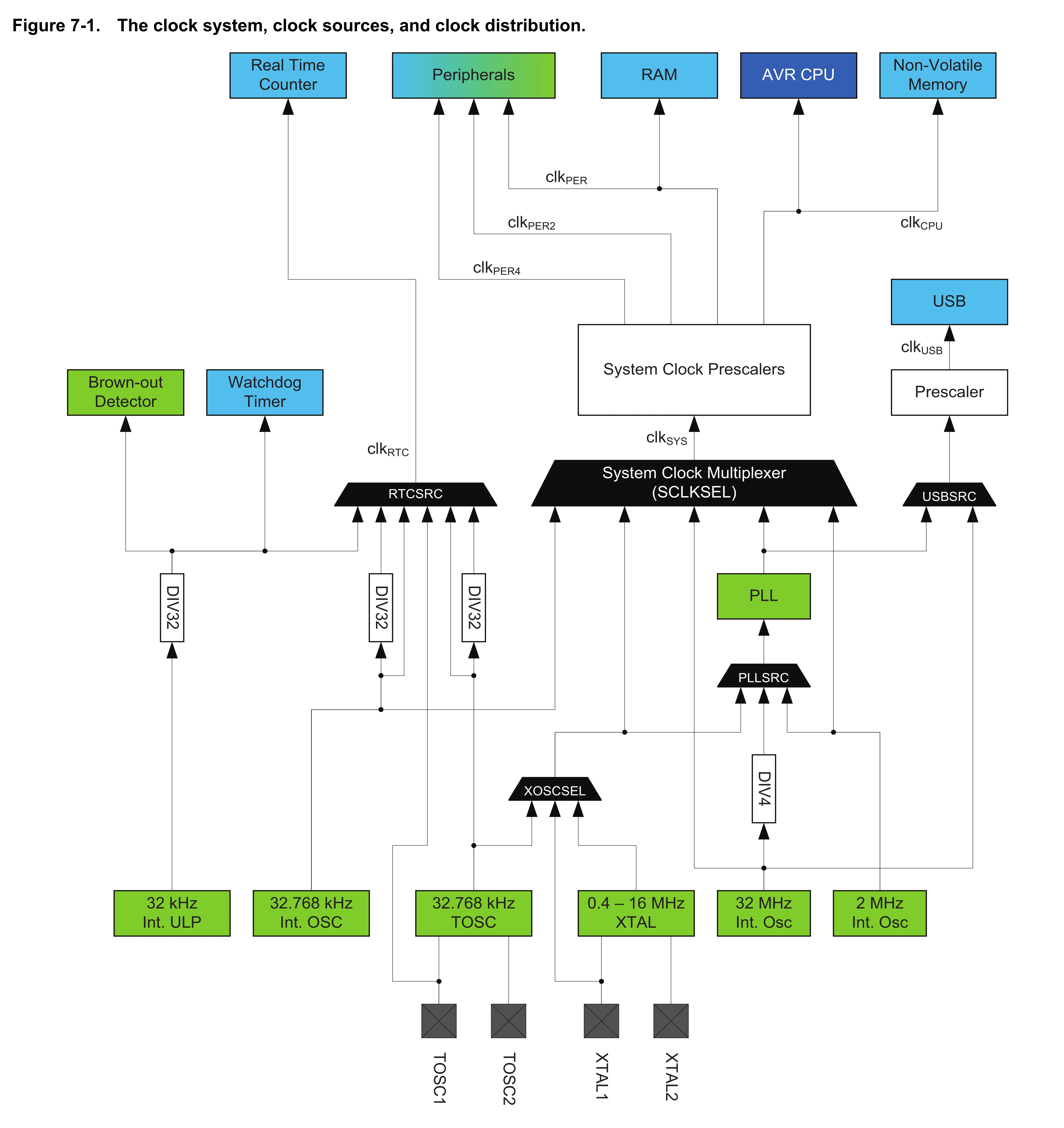
Podsystem zegarowy mikrokontrolera
int davinci_set_sysclk_rate(struct clk *clk, unsigned long rate)
{
unsigned v;
struct pll_data *pll;
unsigned long input;
unsigned ratio = 0;
/* If this is the PLL base clock, wrong function to call */
if (clk->pll_data)
return -EINVAL;
/* There must be a parent... */
if (WARN_ON(!clk->parent))
return -EINVAL;
/* ... the parent must be a PLL... */
if (WARN_ON(!clk->parent->pll_data))
return -EINVAL;
/* ... and this clock must have a divider. */
if (WARN_ON(!clk->div_reg))
return -EINVAL;
pll = clk->parent->pll_data;
input = clk->parent->rate;
/* If pre-PLL, source clock is before the multiplier and divider(s) */
if (clk->flags & PRE_PLL)
input = pll->input_rate;
if (input > rate) {
/*
* Can afford to provide an output little higher than requested
* only if maximum rate supported by hardware on this sysclk
* is known.
*/
if (clk->maxrate) {
ratio = DIV_ROUND_CLOSEST(input, rate);
if (input / ratio > clk->maxrate)
ratio = 0;
}
if (ratio == 0)
ratio = DIV_ROUND_UP(input, rate);
ratio--;
}
if (ratio > pll->div_ratio_mask)
return -EINVAL;
do {
v = __raw_readl(pll->base + PLLSTAT);
} while (v & PLLSTAT_GOSTAT);
v = __raw_readl(pll->base + clk->div_reg);
v &= ~pll->div_ratio_mask;
v |= ratio | PLLDIV_EN;
__raw_writel(v, pll->base + clk->div_reg);
v = __raw_readl(pll->base + PLLCMD);
v |= PLLCMD_GOSET;
__raw_writel(v, pll->base + PLLCMD);
do {
v = __raw_readl(pll->base + PLLSTAT);
} while (v & PLLSTAT_GOSTAT);
return 0;
}
Propagacja zegara w systemie
Długość fali
\(\lambda = \frac{v}{f}\)
\(\lambda = \frac{v}{f} = \frac{3\cdot10^{8}\frac{\text{m}}{\text{s}}}{10\text{GHz}}\)
\(\lambda = \frac{v}{f} = \frac{3\cdot10^{8}\frac{\text{m}}{\text{s}}}{10\text{GHz}} = \frac{3\cdot10^{11}\frac{\text{mm}}{\text{s}}}{10\cdot10^9\frac{1}{\text{s}}}\)
\(\lambda = \frac{v}{f} = \frac{3\cdot10^{8}\frac{\text{m}}{\text{s}}}{10\text{GHz}} = \frac{3\cdot10^{11}\frac{\text{mm}}{\text{s}}}{10\cdot10^9\frac{1}{\text{s}}} = 30\text{mm}\)
Zegary czasu rzeczywistego
Przeznaczenie czasu rzeczywistego
- wyświetlanie czasu użytkownikowi
- logowanie zdarzeń
- wykonywanie zaplanowanych zadań
- komunikacja z innymi urządzeniami (np. TDMA)
- licencjonowanie funkcjonalności
Dostarczenie czasu rzeczywistego
- liczenie czasu w programie
- RTC zintegrowany w mikrokontrolerze
- RTC zewnętrzny
- odbiornik GNSS (np. GPS)
- NTP (Network Time Protocol)
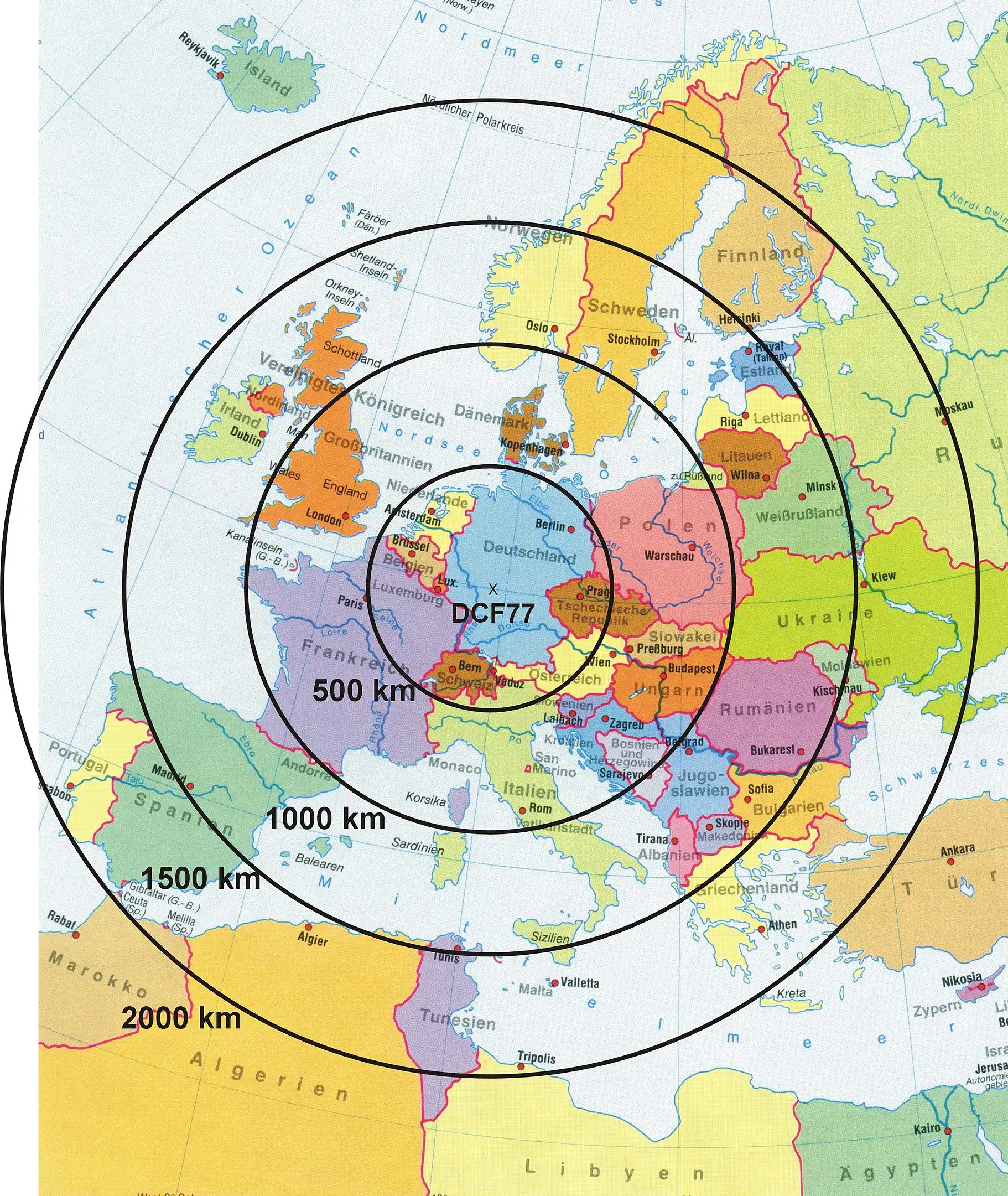
- DCF77 (50kW@77,5kHz — 2000km)
- GSM
- RDS (Radio Data System) — ±100ms
- Bluetooth (sparowany telefon komórkowy)
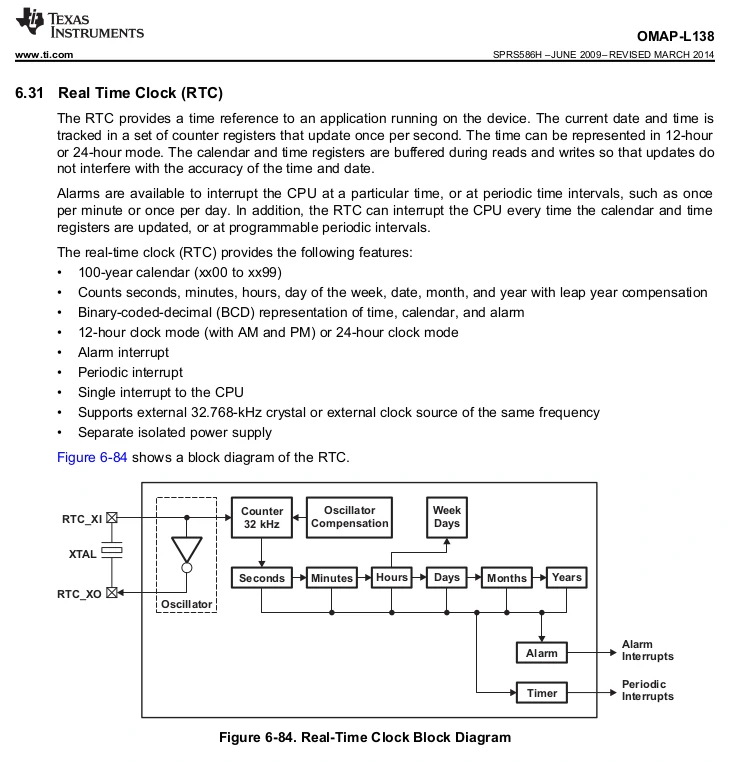

Częstotliwość oscylatora
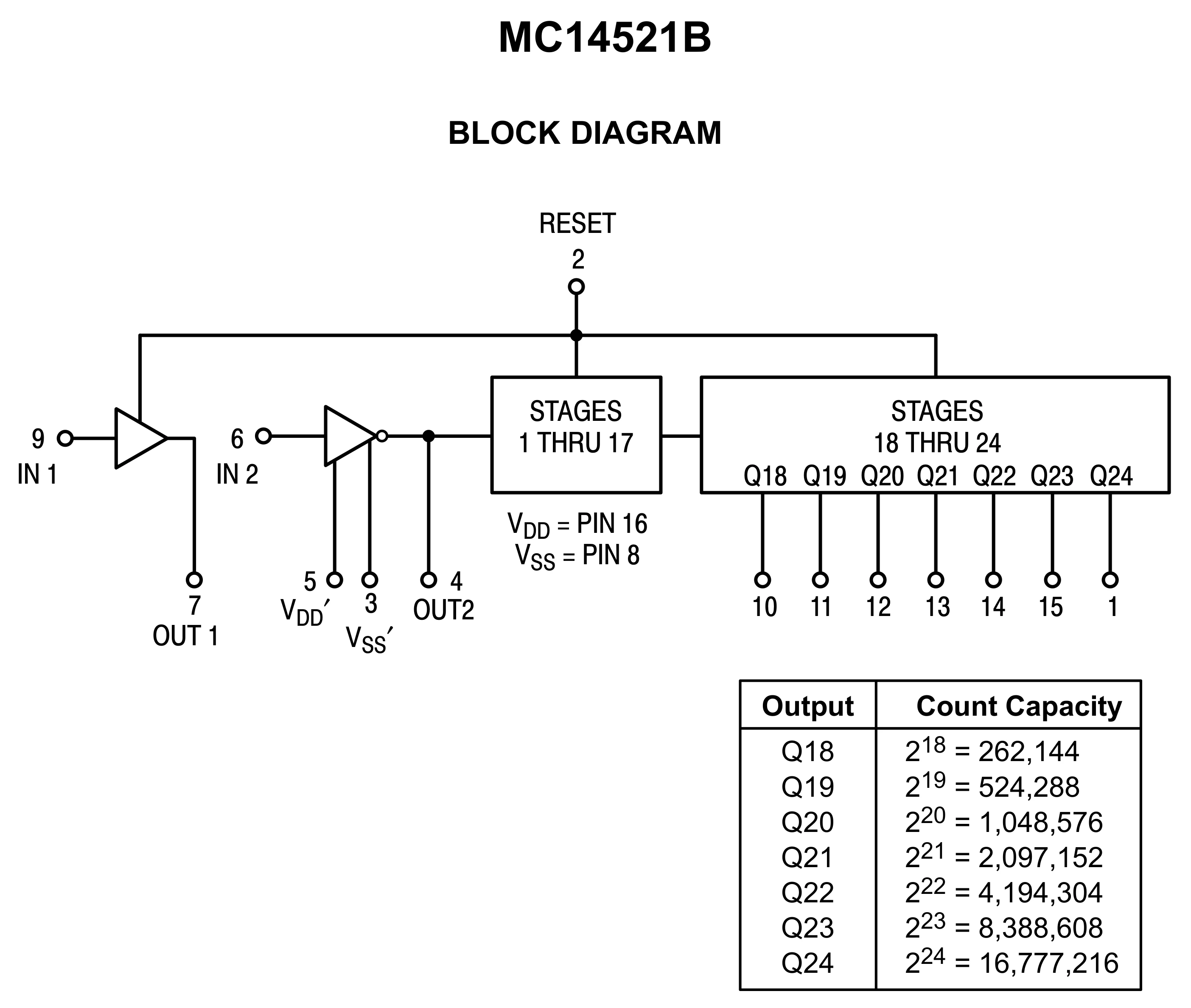
Dlaczego \(f = 32{,}768\text{kHz}\)?
\(t = \frac{32{,}768\text{kHz}}{2^{n}}\)
\(t = \frac{32{,}768\text{kHz}}{2^{15}}\)
\(t = \frac{32{,}768\text{kHz}}{2^{15}} = 1\text{s}\)