Wykład 9:
Systemy operacyjne czasu rzeczywistego
Mariusz Chilmon
m.chilmon@amw.gdynia.pl
uc.vmario.org
Zadania systemu operacyjnego
Zadania OS
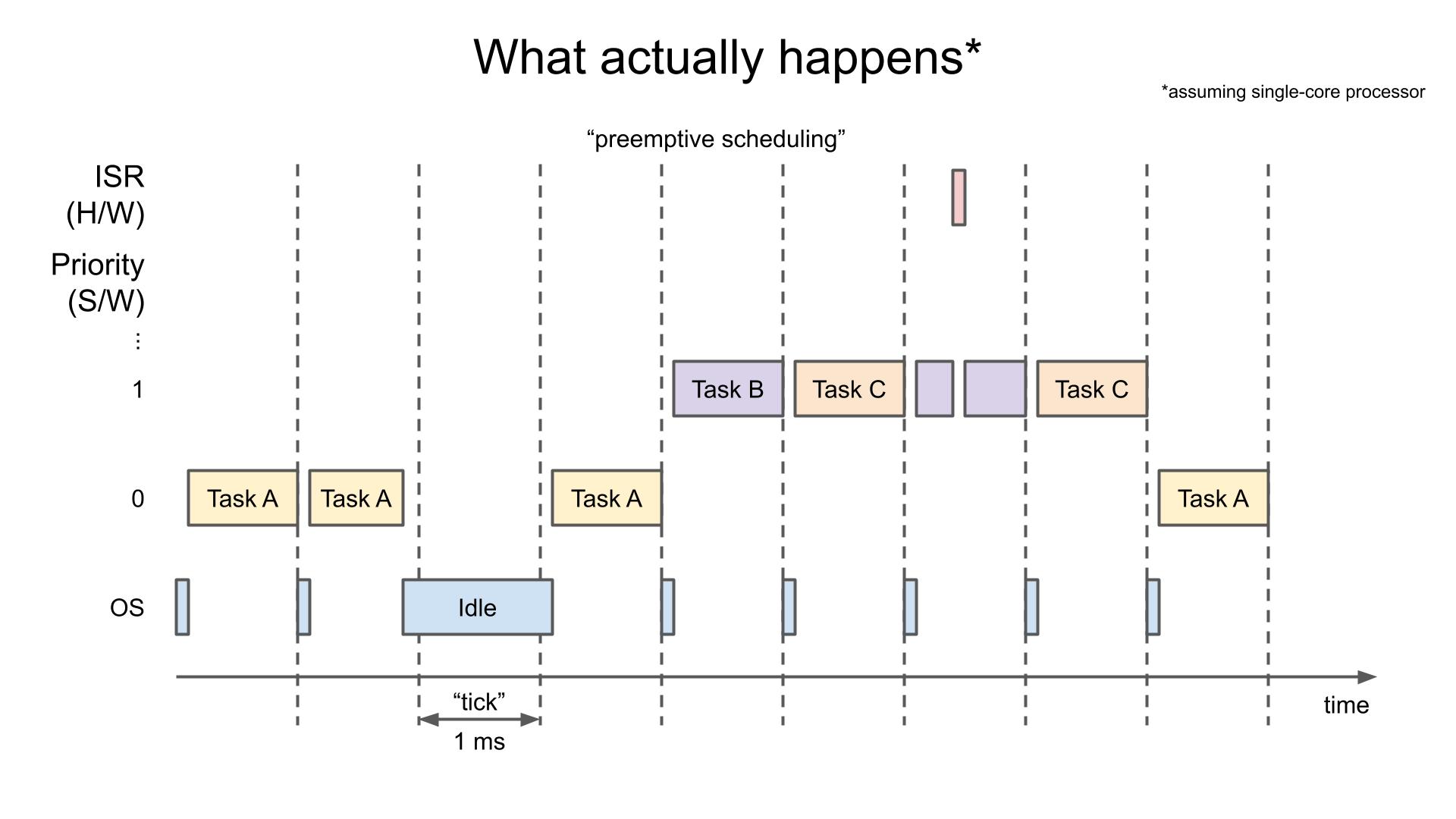
- przydział czasu procesora zadaniom
- przydział pamięci operacyjnej zadaniom
- dostarczanie mechanizmów komunikacji i synchronizacji zadań
- obsługa sprzętu
- zestawianie połączeń sieciowych★
- zarządzanie plikami★
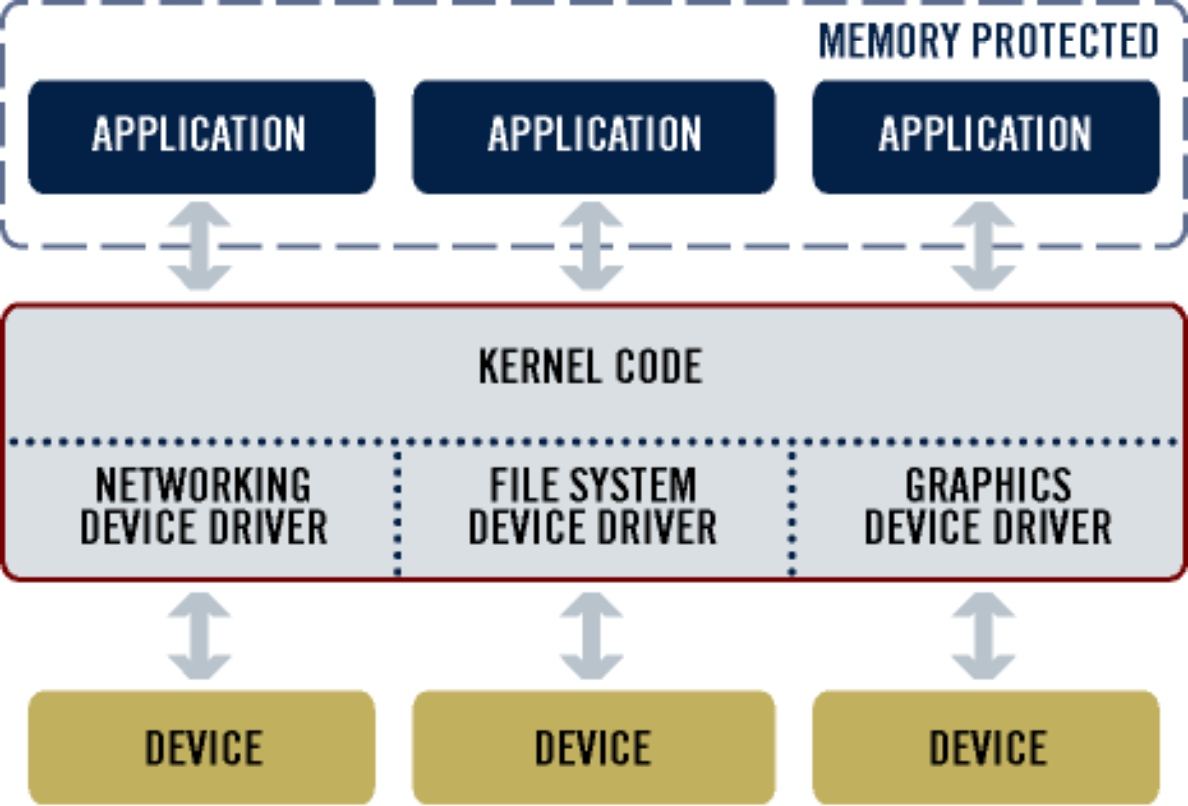
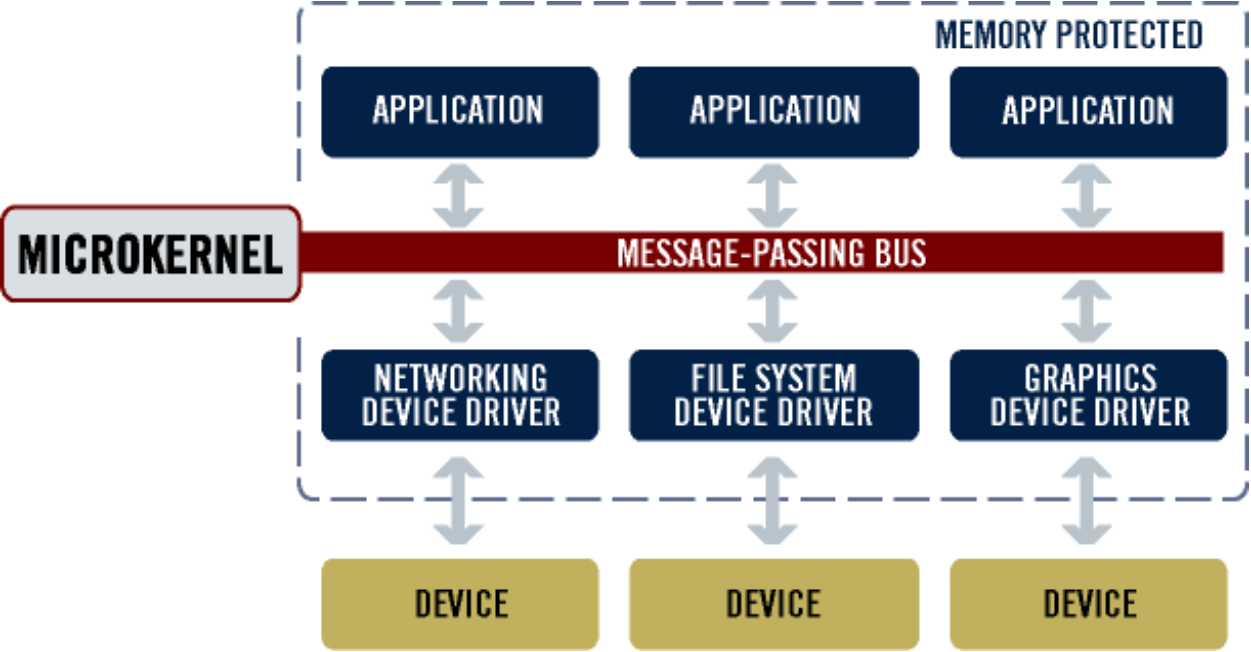
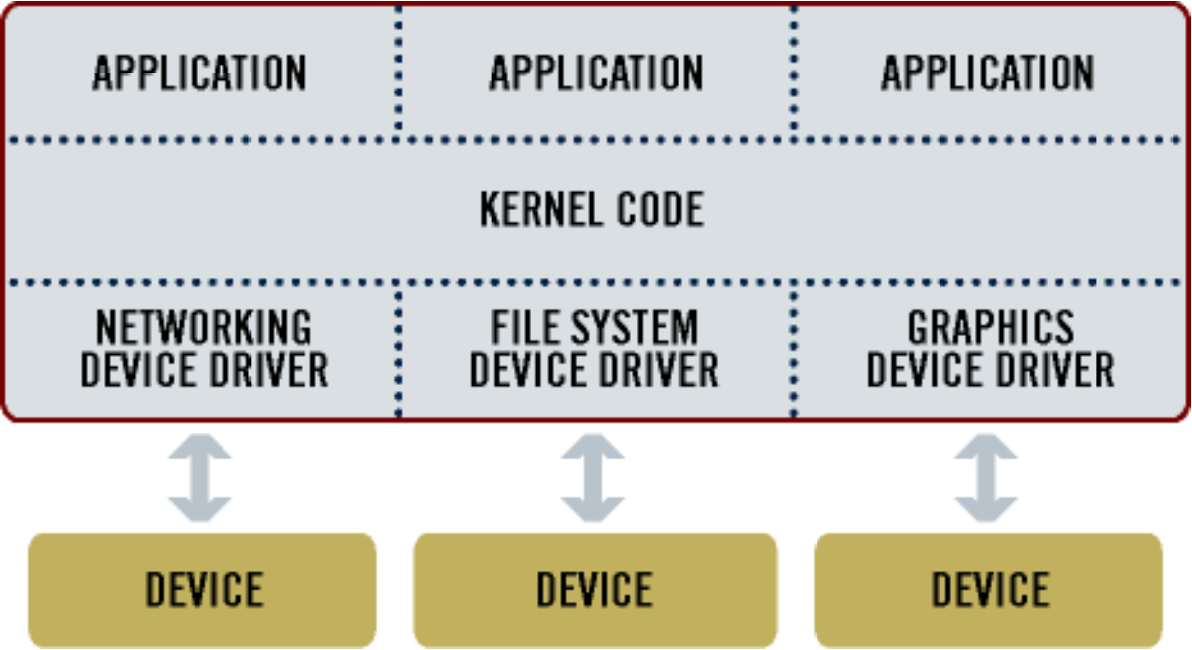
Kernel
- pełny dostęp do pamięci fizycznej
- zarządza pamięcią wirtualną
- pełny dostęp do zasobów sprzętowych
- pełny dostęp do przerwań sprzętowych
- zarządza pracą programów przestrzeni użytkownika (scheduler, przydział pamięci)
- udostępnia sterowniki urządzeń, systemy plików, stosy protokołów sieciowych itp.
Programy w przestrzeni użytkownika
- ograniczony dostęp do pamięci
- brak bezpośredniego dostępu do sprzętu
- podlegają schedulerowi
- mogą na nie zostać nałożone ograniczenia (czas procesora, zużycie pamięci, liczba otwartych plików)
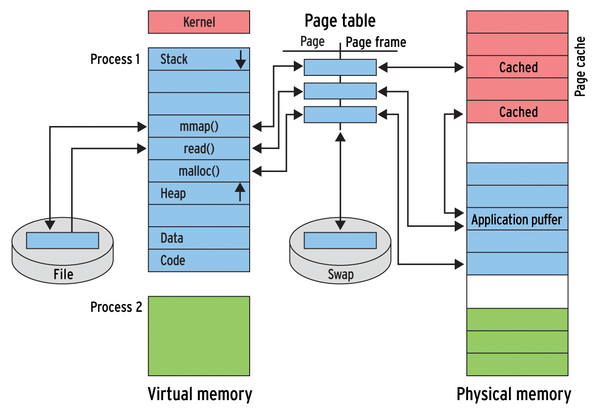
MMU (Memory Management Unit)
- tłumaczy adresy wirtualne na fizyczne za pomocą PTE (Page Table Entry) i jego cache TLB (Translation Lookaside Buffer)
- dzieli pamięć na segmenty (na ogół rzędu 4KiB), które podlegają ochronie
GNU/Linux Embedded
- często brak GUI
- BusyBox
- uClibc, musl
Specyfika RTOS (Real-Time Operating System)
- system operacyjny kompilowany wraz całością oprogramowania
- brak pamięci wirtualnej i kontroli pamięci (ewentualnie MPU)
- brak sterowników urządzeń
- zadania o niskim priorytecie mogą pozostać nieobsłużone
Przykłady RTOS-ów
- FreeRTOS (licencja MIT)
-
SAFERTOS precertyfikowany:
- IEC 61508-3 SIL 3 (Safety Integrity Level)
- ISO 26262 ASIL D (Automotive Safety Integrity Level)
- DSP/BIOS → SYS/BIOS → TI-RTOS
- RT Linux
Uruchamianie mikrokontrolera
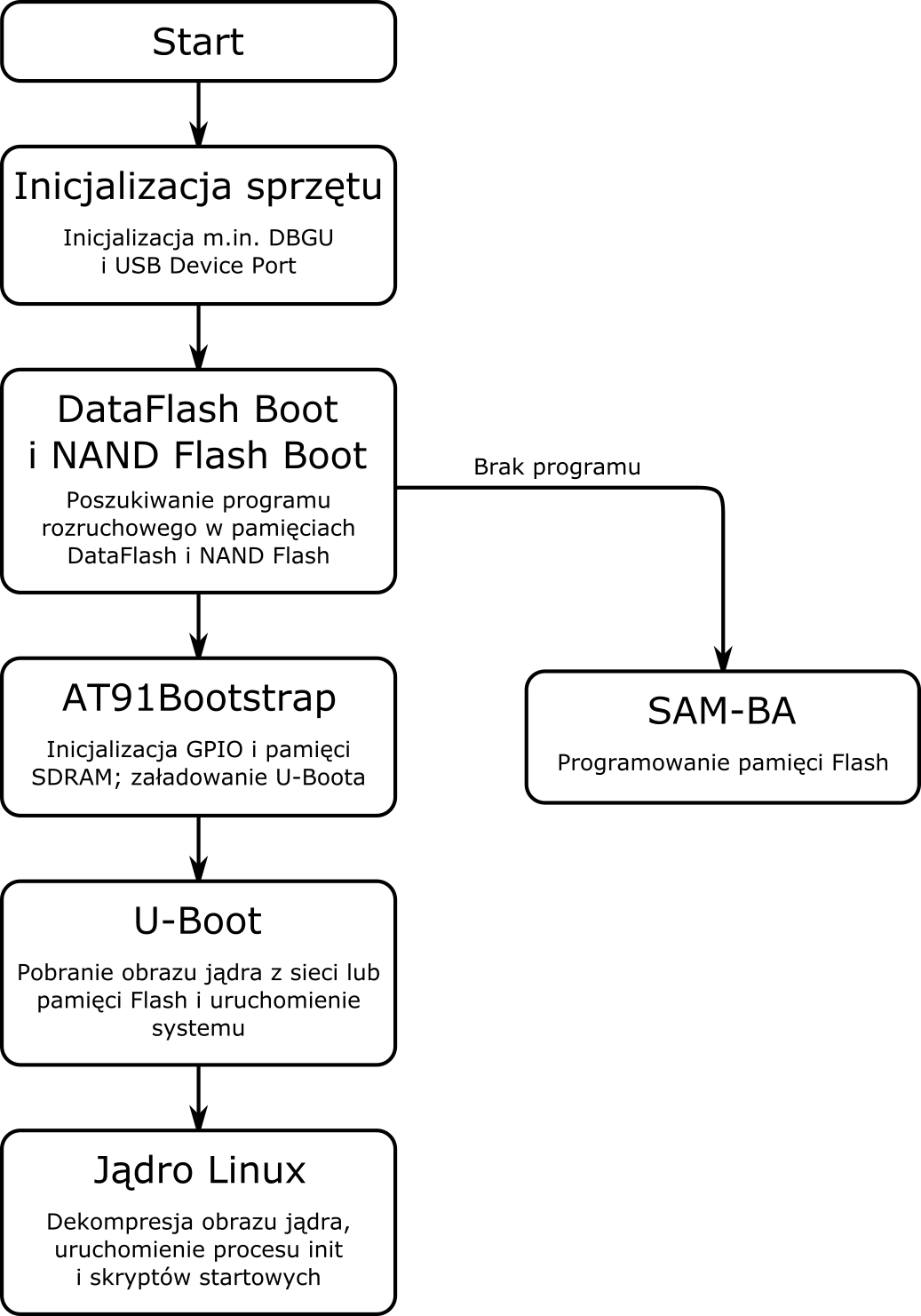
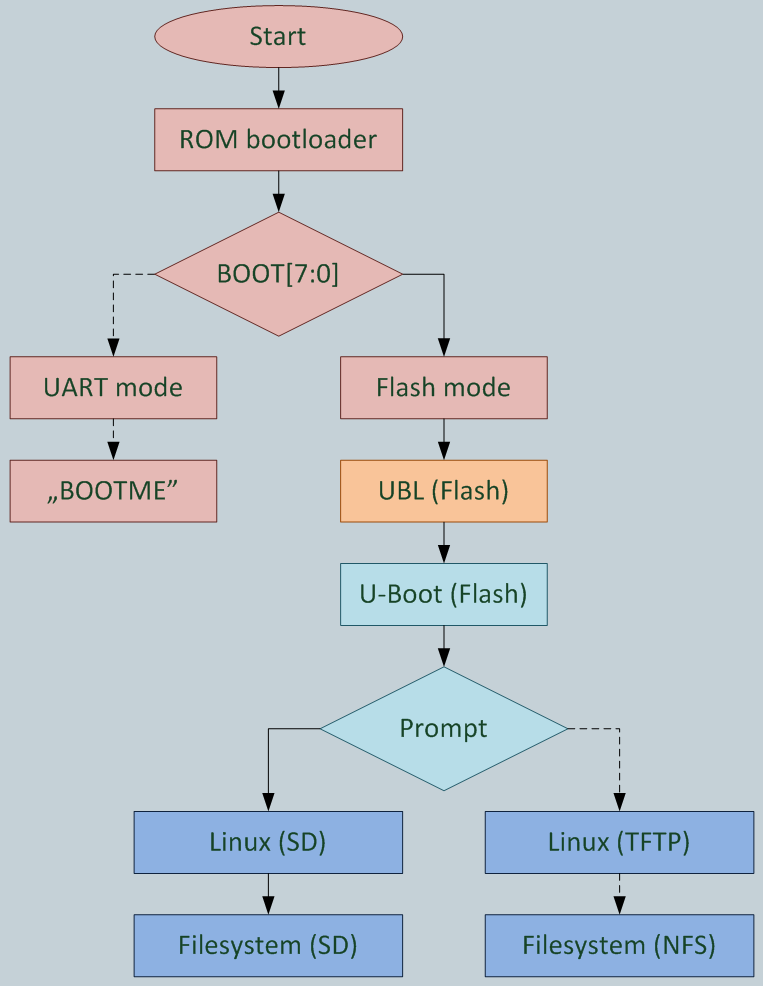

Podstawowe zadania bootloadera
- odpowiednik BIOS-a (UEFI) w PC
- może być umieszczony w oddzielnej pamięci (NOR Flash)
- wstępna konfiguracja mikrokontrolera
- inicjalizacja interfejsu Ethernet, karty pamięci
- wyświetlenie splashscreena
- ładowanie systemu operacyjnego z pamięci nieulotnej
Opcje serwisowe
- obsługa trybów awaryjnych i serwisowych
- uruchomienie terminala RS-232
- diagnostyka urządzenia, flashowanie pamięci, testowanie TCP/IP itp.
- ładowanie deweloperskiego systemu operacyjnego via USB lub Ethernet (TFTP)

